












- A +
- A
- A -
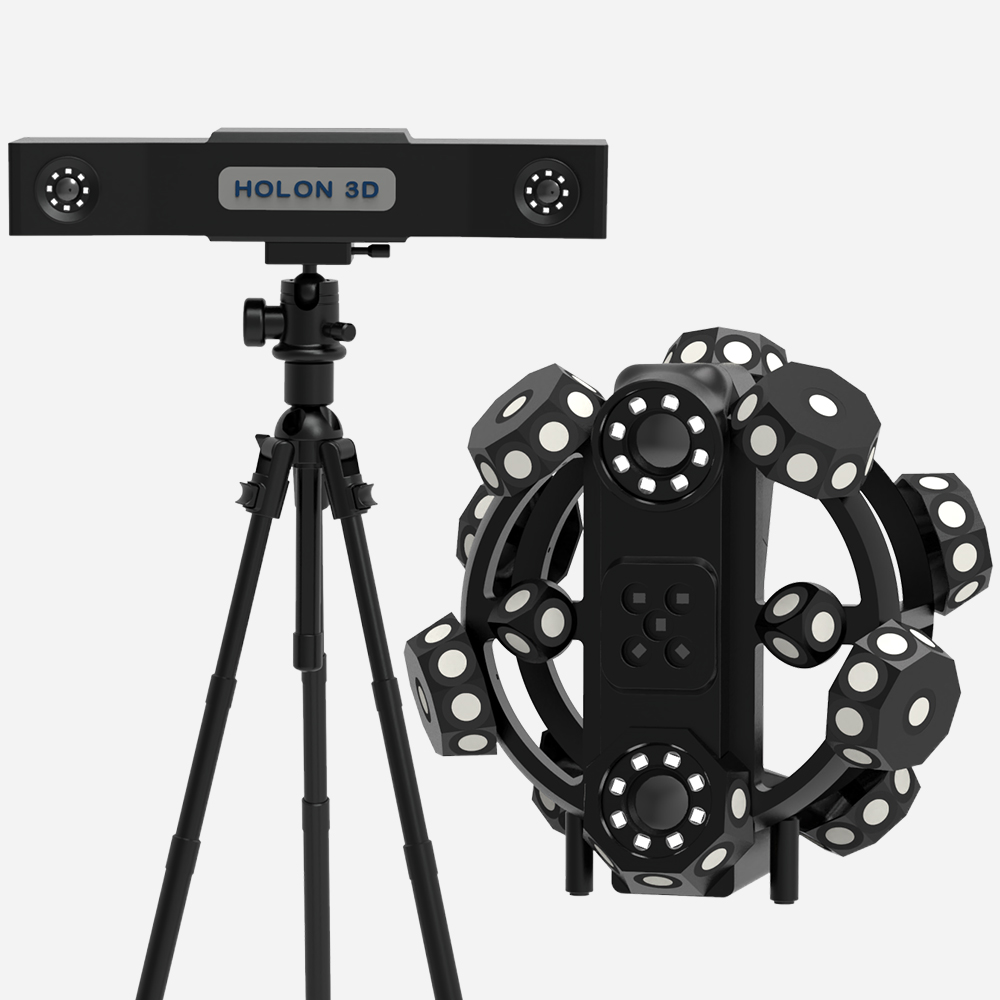
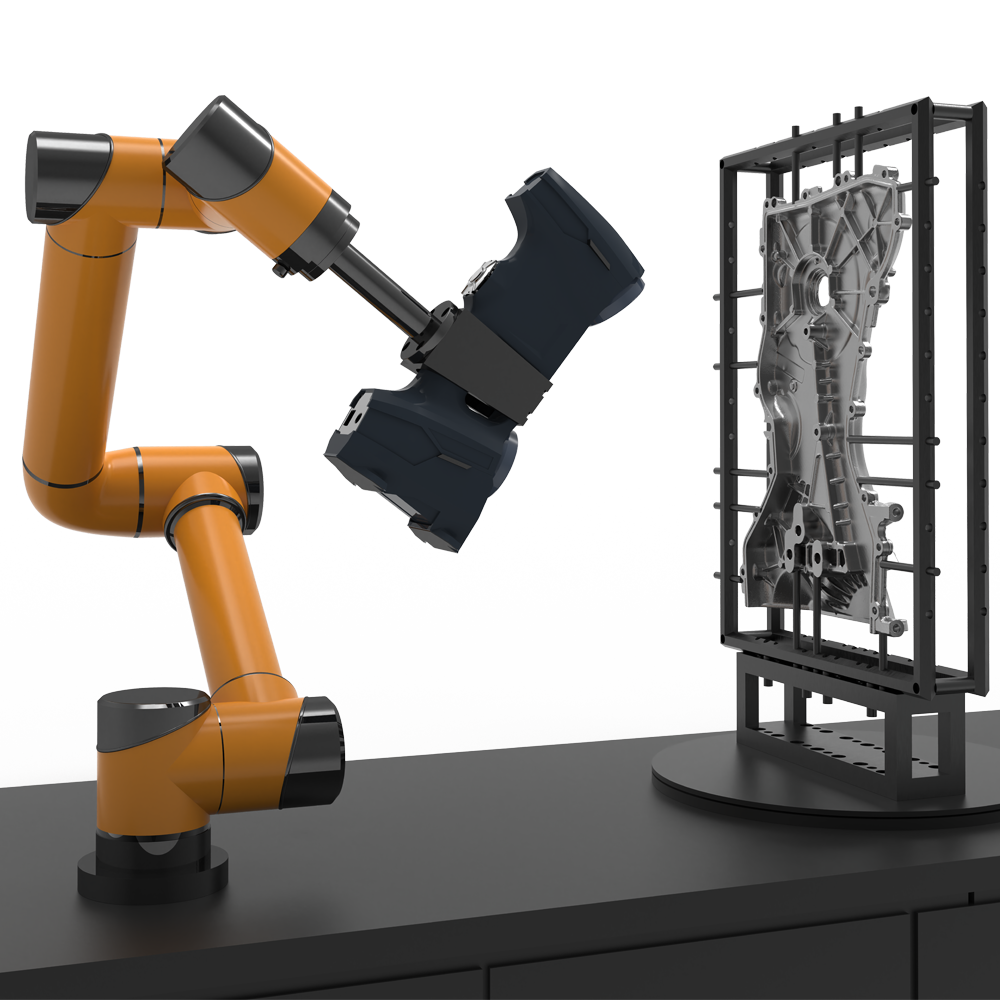
医疗手术机器人的手臂夹子是实现精准手术操作的核心部件,其结构精度直接影响手术动作的稳定性与操控准确性。客户需对该手臂夹子进行三维扫描,获取完整且高精度的三维数据,将其作为后续产品优化与设计的基准,为提升手术器械性能、保障手术安全奠定基础。由于手臂夹子结构精巧、关键细节尺寸严苛,客户对扫描精度与数据完整性要求极高,传统测量方式难以满足需求,因此选择 HOLON 3D Smart 49 手持式全蓝激光工业级三维扫描仪,为手臂夹子的数字化基准数据采集提供可靠技术支撑。
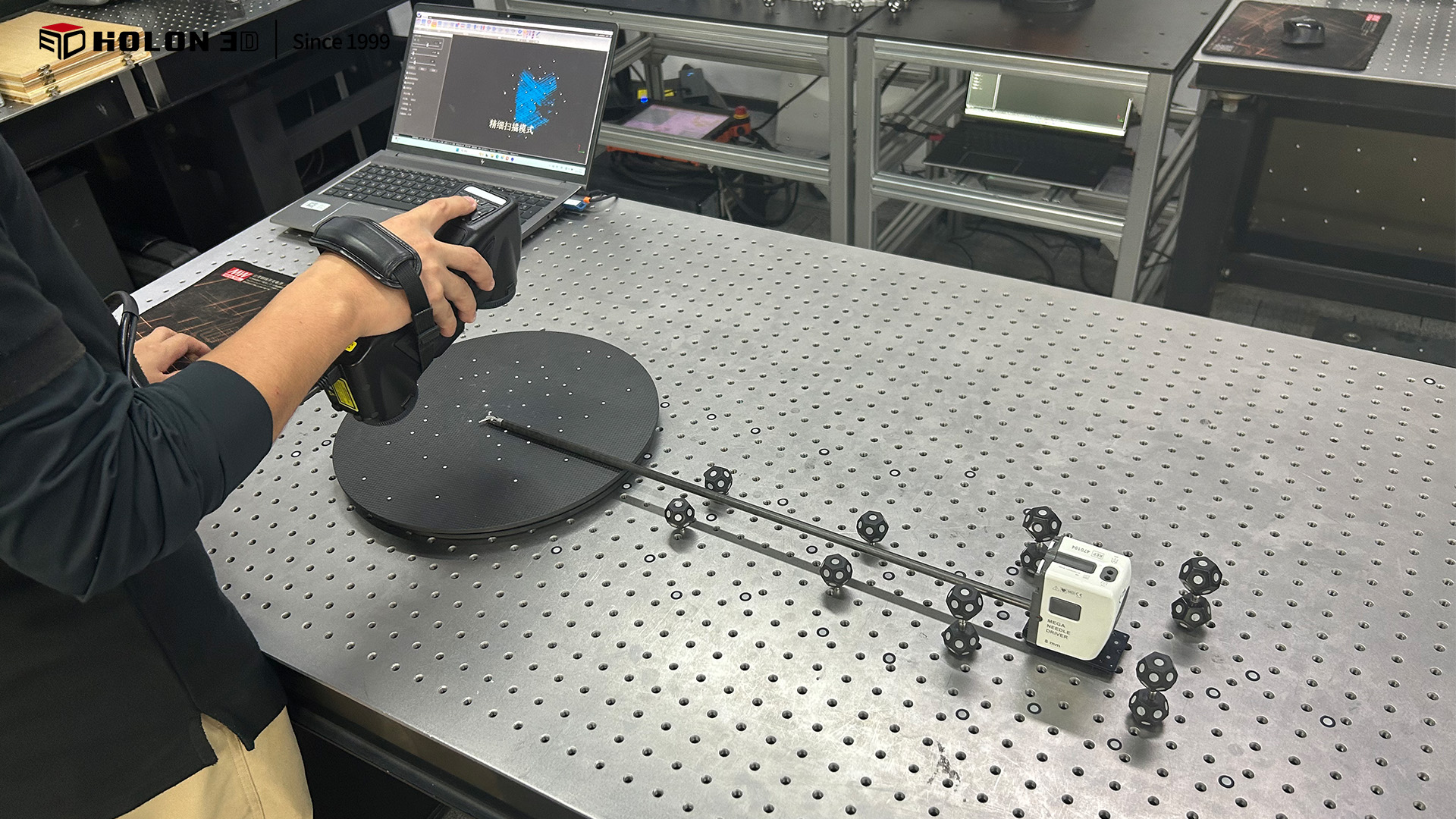
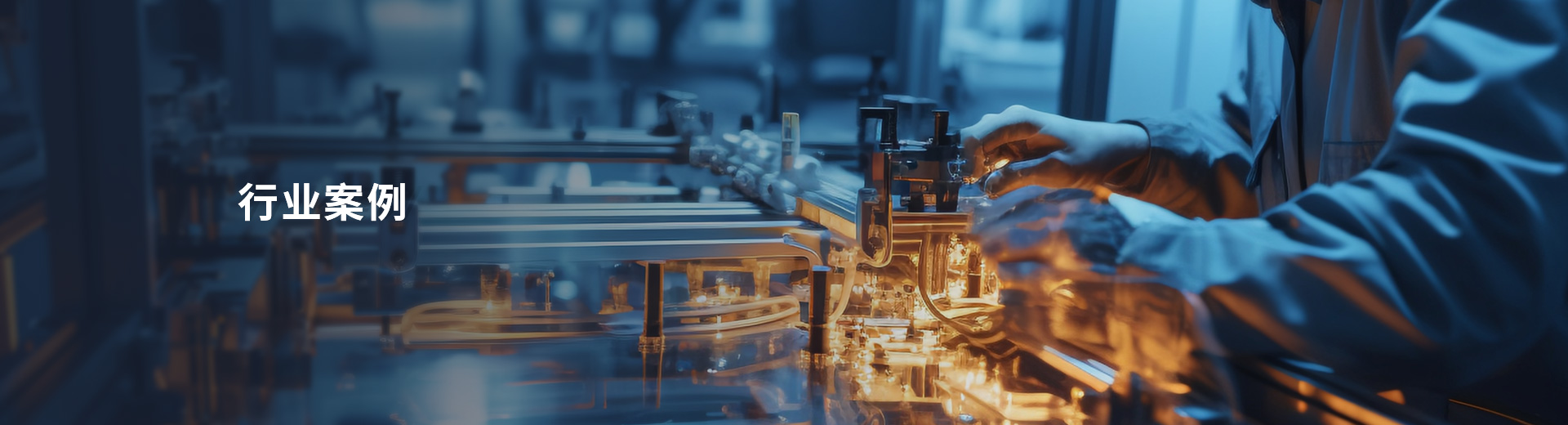
扫描现场图
扫描现场图
手臂夹子体积小巧且包含诸多细微结构,如夹口咬合面、关节连接孔等,这些细节的尺寸精度直接决定基准数据的可靠性,传统测量工具难以精准捕捉细微特征,易出现数据偏差或遗漏,无法满足高精度要求;作为手术器械核心部件,其表面可能存在精密涂层或脆弱结构,接触式测量易造成表面损伤或结构变形,破坏工件原始状态;同时,客户需获取夹子整体完整数据以支撑全面设计优化,传统分段测量易产生拼接误差,导致数据连贯性不足,无法完整还原工件结构,严重影响后续产品优化与设计的准确性。
采用 HOLON 3D Smart 49 手持式全蓝激光工业级三维扫描仪,可针对性解决手臂夹子扫描的核心难题。该扫描仪搭载全蓝激光技术,具备超高扫描精度,能清晰捕捉夹口咬合面的平整度、关节连接孔的孔径公差等细微特征,确保数据精度完全匹配客户对基准数据的严苛要求;非接触式扫描方式避免与夹子表面及精密结构直接接触,有效保护工件原始状态与表面涂层,杜绝结构变形风险;手持设计灵活便捷,基本无测量盲区,完整还原工件整体结构,保障数据完整性;高速扫描能力大幅缩短数据采集时间,快速生成完整三维数据,可直接作为设计基准。扫描后生成的三维数据精准、完整,完全符合客户后续产品优化与设计的基准需求,为医疗手术机器人手臂夹子的性能升级与质量提升提供了坚实的数字化基础。
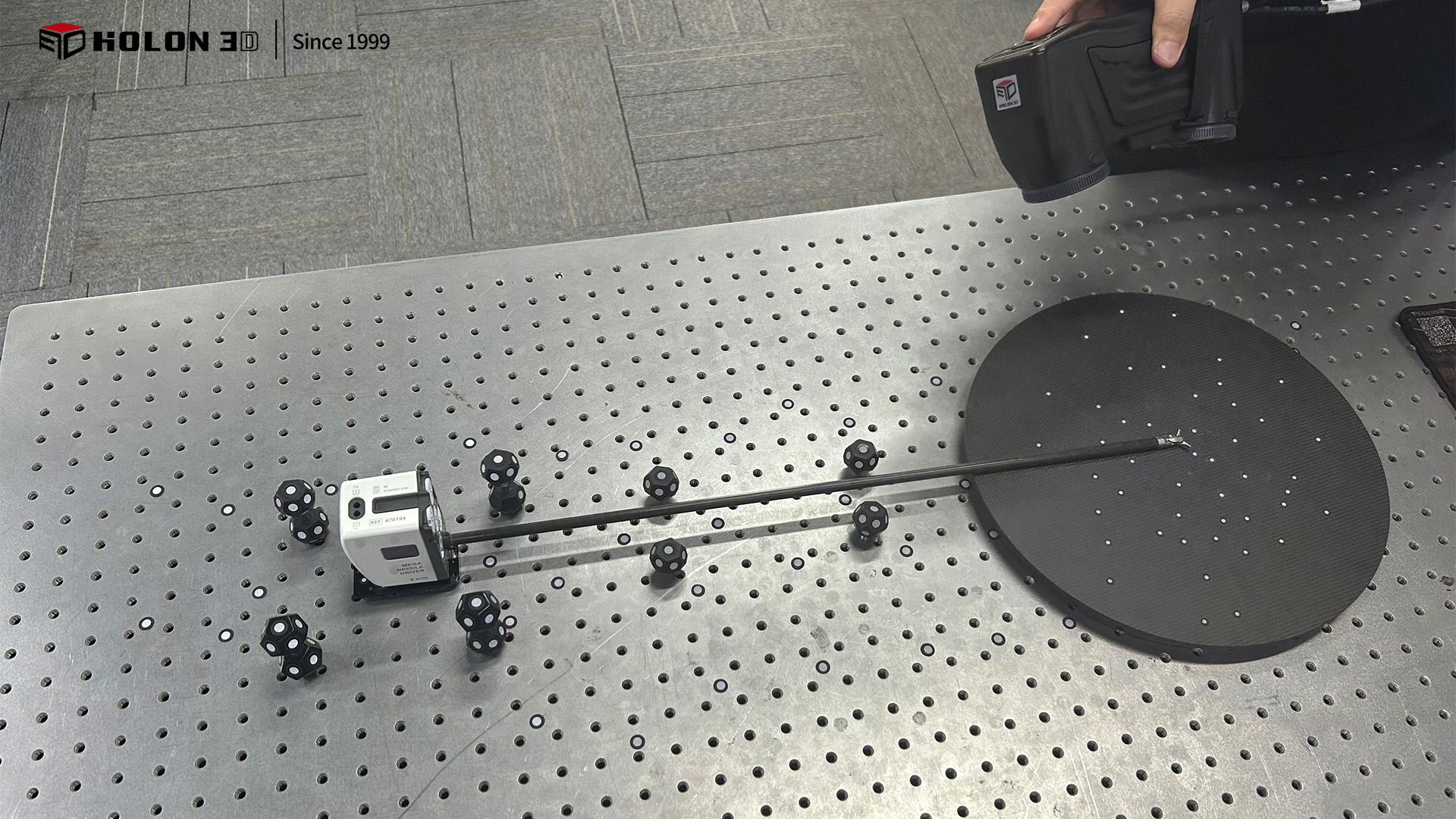
扫描数据图
扫描数据图
扫描数据图